Home
Products
Pressure Sensor
Pressure Switch
Differential Pressure Transmitter
Pressure Gauge
Force Sensor
Torque Sensor
Dsipleacment Sensor
Tilt Sensor
Temperature Sensor
Temperature Switch
Digital Indicator
About Us
About TM
Our Honor
Cooperative Partner
Factory Equipment
Applications
Services
Custom Services
Download
FAQ
News
Contact
:
All
Product Name
Product Keyword
Product Model
Product Summary
Product Description
Multi Field Search
:
All
Product Name
Product Keyword
Product Model
Product Summary
Product Description
Multi Field Search
Home
Products
Pressure Sensor
Pressure Switch
Differential Pressure Transmitter
Pressure Gauge
Force Sensor
Torque Sensor
Dsipleacment Sensor
Tilt Sensor
Temperature Sensor
Temperature Switch
Digital Indicator
About Us
About TM
Our Honor
Cooperative Partner
Factory Equipment
Applications
Services
Custom Services
Download
FAQ
News
Contact
OUR PRODUCTS
Pressure Sensor
Force Sensor
Torque Sensor
Displeacement Sensor
Pressure Sensor
Pressure Transducer
NS-P-I7 Pressure Transducer
Industrial Pressure Transducer
NS-P-W Pressure Transducer
Force Sensor
Load Cell
Load Cell
Ring Load Cell
Beam Load Cell
Torque Sensor
Torque Sensor
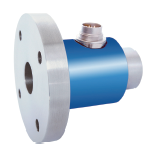
Non-rotating Torque Sensors
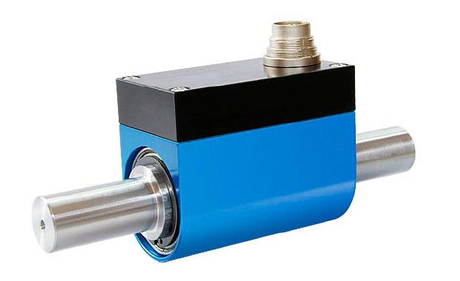
Torque Sensors
Torque Transducers
Displeacement Sensor
Displeacement Sensor
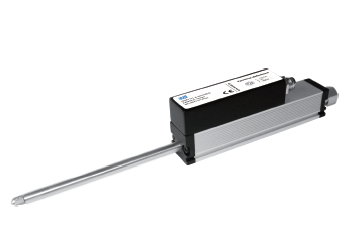
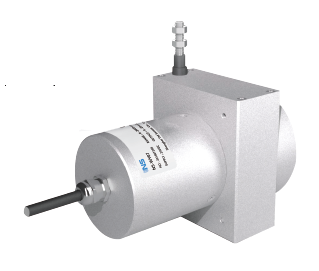
Displacement Sensor
Displacement Sensor
Displacement Sensor
READ MORE
ABOUT US
TRADEMARK "ns"
INDUSTRY APPLICATIONS
Aerospace
Air
Conditining
Construction Machinery
Rail
Transit
High Speed Train
News Center
More
TM Sensor Co., Ltd.(Sensor BU)
TM Automation Instruments Co., Ltd.
(Headquarters)
QUICK LINKS
Home
Products
Custom Services
Applications
Download
News
Contact Us
CONTACT US
Add : 16F.Building 11. No.518 Xinzhuan Road, Shanghai ,China
Mobile/Wechat: +86-18221039857
Tel : +86-021-57778012
E-mail :
cherry@tm-auto.com
Skype/Whatsapp : +86-15160399837
Subscribe
weiwei@tmvenus.com
+86-18917346849
+86-18917346849
Copyright
2019 TM Automation Instruments Co., Ltd.
沪ICP备17037612号
Sitemap